Matthias Jammot
PhD Student at Harvard University
AI & Robotics for Humans
I am a doctoral student at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) working on AI & Robotics for Humans. the supervision of Prof. Conor Walsh. My areas of interest encompass enhancing human lives through wearable sensors, machine learning, and robotics.
I am the recipient of the Arthur Sachs Fulbright Scholarship and the Jean Gaillard Memorial Fellowship, which alongside Harvard's funding, support me in my research.
Prior to starting my PhD, I worked on multimodal sensing (egocentric vision + physiological sensors) for health monitoring and human-computer interaction with Prof. Christian Holz of the Sensing, Interaction & Perception Lab at ETH Zürich.
I completed a Master's degree (MEng) at Imperial College London in Mechanical Engineering with a Year Abroad. In this 4-year course (BEng+MEng=3+1), I pursued my final year at ETH Zürich in the Robotics, Systems and Control MSc. My Master's thesis on the design and control of a novel lower-limb soft exoskeleton at the Sensory-Motor Systems Lab was supervised by Prof. Robert Riener.
News
- Dec 2025: Attended NeurIPS 2025 in San Diego to present my paper egoEMOTION.
- Sep 2025: My paper egoEMOTION: Egocentric Vision and Physiological Signals for Emotion and Personality Recognition in Real-world Tasks was accepted at NeurIPS 2025 !
- Jun 2025: Awarded the Arthur Sachs Fulbright Scholarship.
- May 2025: Attended ICRA 2025 in Atlanta to present my paper Stillsuit.
- Apr 2025: Awarded the Jean Gaillard Memorial Fellowship.
- Jan 2025: Accepted to Harvard University's Engineering and Applied Sciences PhD program (3% acceptance rate)!
- Jan 2025: My MSc thesis A Comparative Study of Pulley and Bowden Transmissions in a Novel Cable-Driven Exosuit, the Stillsuit has been accepted at ICRA 2025.
- Oct 2024: Graduated from Imperial College London in Mechanical Engineering with a Year Abroad with First-Class Honours!
- Sep 2023: Started my Master's Year Abroad at ETH Zürich.
- Jun 2023: Started my summer internship at Ottobock as a researcher.
- Jun 2022: Started my summer internship at Amazon as a business analyst.
- Oct 2020: Started my Bachelor's with integrated Master's degree in Mechanical Engineering at Imperial College London.
Peer-reviewed Publications
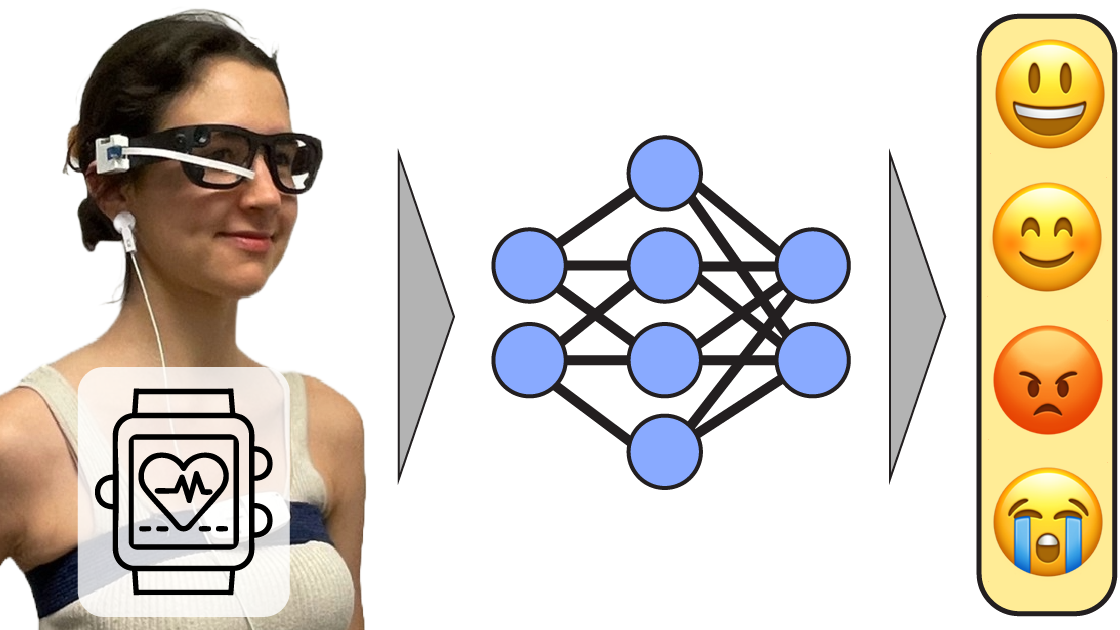
egoEMOTION: Egocentric Vision and Physiological Signals for Emotion and Personality Recognition in Real-World Tasks
Advances in Neural Information Processing Systems (NeurIPS), 2025. (*equal contribution)

Comparative Study of Pulley and Bowden Transmissions in a Novel Cable-Driven Exosuit, the Stillsuit
IEEE International Conference on Robotics and Automation (ICRA), 2025.