Matthias Jammot
AI & Robotics for Humans
I am a first-year CS PhD student at Harvard University. My research focuses on foundation models of human motion, combining machine learning with physics-based reinforcement learning to decode human intent and generate adaptive control policies for real-world robotic deployment. I am grateful to be supported by the Harvard Kenneth C. Griffin Fellowship, the Arthur Sachs Fulbright Scholarship, and the Jean Gaillard Memorial Fellowship.
Prior to Harvard, I worked with Prof. Christian Holz at the Sensing, Interaction & Perception Lab at ETH Zürich, combining egocentric vision and physiological signals for affect recognition and health monitoring. I hold an MEng from Imperial College London (First Class Honours), during which I spent a year in the MSc in Robotics, Systems and Control from ETH Zürich, where I worked on the design and control of exosuits.
News
Publications
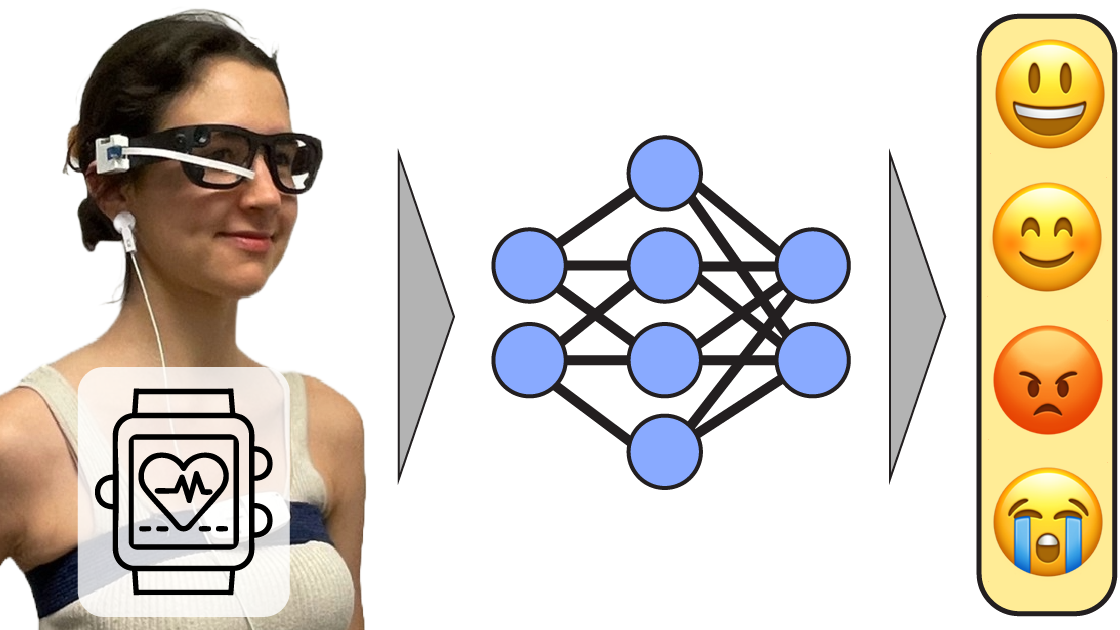
egoEMOTION: Egocentric Vision and Physiological Signals for Emotion and Personality Recognition in Real-World Tasks
Advances in Neural Information Processing Systems (NeurIPS), 2025. (*equal contribution)

Comparative Study of Pulley and Bowden Transmissions in a Novel Cable-Driven suit, the Stillsuit
IEEE International Conference on Robotics and Automation (ICRA), 2025.